שתף:



3 מערכות משוואות לינאריות וכיצד לפתור אותן
ה משוואות לינאריות הם משוואות פולינומיות עם אחד או כמה ידועים. במקרה זה, הלא ידועים אינם מורמים לכוחות, וגם הם אינם מוכפלים בינם לבין עצמם (במקרה זה נאמר כי המשוואה היא של תואר ראשון או תואר ראשון).
משוואה היא שוויון מתמטי שבו יש אחד או יותר של אלמנט לא ידוע שנקרא לא ידוע או לא ידוע במקרה שיש יותר מאחד. כדי לפתור משוואה זו יש צורך לגלות את הערך של הבלתי ידועים.
למשוואה לינארית יש את המבנה הבא:
א0· 1 + א1· X1+ א2· X2+... + אn· Xn= b
לאן0, א1, א2,... אn הם מספרים ממשיים אשר אנו מכירים את הערך שלהם והם נקראים מקדמי, b הוא גם מספר אמיתי ידוע זה נקרא מונח עצמאי. ולבסוף הם X1, X2,..., Xn אשר ידועים כנודעים. אלו הם המשתנים שערכם אינו ידוע.
מערכת של משוואות לינאריות היא סדרה של משוואות לינאריות כאשר הערך של הבלתי ידוע זהה בכל משוואה.
באופן הגיוני, הדרך לפתרון מערכת של משוואות לינאריות היא להקצות ערכים לא נודעים, כך שוויון ניתן לאמת. כלומר, יש לחשב את הבלתי ידועים כך שכל משוואות המערכת יתממשו בו זמנית. אנו מייצגים מערכת של משוואות לינאריות כדלקמן
א0· 1 + א1· X1 + א2· X2 +... + אn· Xn = an + 1
.ב0· 1 + b1· X1 + .ב2· X2 +... + bn· Xn = bn + 1
c0· 1 + c1· X1 + c2· X2 +... + cn· Xn = cn + 1
... .
ד0· 1 + ד1· X1 + ד2· X2 +... + דn· Xn = dn + 1
שם0, א1,... אn,.ב0,.ב1,..., בn ,c0 ,c1,... גn וכו 'לנו מספרים אמיתיים ו unknowns לפתור הם X0,..., Xn ,Xn + 1.
כל משוואה לינארית מייצגת קו ולכן מערכת משוואות של משוואות לינאריות N מייצגת N ישר נמשכת בחלל.
בהתאם למספר הלא ידועים שיש לכל משוואה ליניארית, הקו המייצג משוואה אמורה להיות מיוצג בממד אחר, כלומר, משוואה עם שני אלמונים (לדוגמה, 2 X1 + X2 = 0) מייצג קו בחלל דו מימדי, משוואה עם שלושה לא ידועים (לדוגמה 2 X1 + X2 - 5 · X3 10 =) יהיה מיוצג בחלל תלת מימדי וכן הלאה.
כאשר פותרים מערכת משוואות, ערכי X0,..., Xn ,Xn + 1 קורים את הקווים בין השורות.
על ידי פתרון מערכת משוואות אנו יכולים להגיע למסקנות שונות. בהתאם לסוג התוצאה שאנו מקבלים, אנו יכולים להבחין בין 3 סוגים של מערכות של משוואות לינאריות:
1- תאימות בלתי מוגבלת
למרות שזה אולי נשמע כמו בדיחה, זה אפשרי כי כאשר מנסים לפתור את מערכת המשוואות, נגיע ברור של סגנון 0 = 0.
מצב זה מתרחש כאשר יש פתרונות אינסופיים למערכת המשוואות, וזה קורה כאשר מתברר שבמערכת המשוואות שלנו המשוואות מייצגות אותו קו. אנו יכולים לראות זאת בצורה גרפית:
כמערכת משוואות אנו לוקחים:
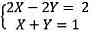
על ידי בעל 2 משוואות עם 2 ידוע כדי לפתור אנו יכולים לייצג את הקווים במישור דו מימדי
כפי שאנו יכולים לראות את הקווים עם אותו, ולכן כל הנקודות של המשוואה הראשונה בקנה אחד עם אלה של המשוואה השנייה, ולכן יש נקודות רבות כמו לחתוך כמו נקודות יש קו, כלומר, אינסוף.
2 לא תואם
כאשר קוראים את השם אנו יכולים לדמיין כי המערכת הבאה שלנו של משוואות לא יהיה פתרון.
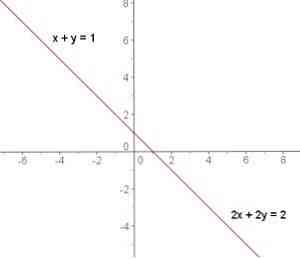
אם ננסה לפתור, למשל, מערכת משוואות זו
מבחינה גרפית זה יהיה:
אם נכפיל את כל תנאי המשוואה השנייה, נקבל כי X + Y = 1 שווה ל - 2 · X + 2 · Y = 2. ואם זה הביטוי האחרון הוא מופחת מן המשוואה הראשונה, אנו מקבלים
2 · X-2 · X + 2 · Y -2 · Y = 3-2
או מה זה אותו דבר
0 = 1
כאשר אנו נמצאים במצב זה זה אומר כי הקווים המיוצגים במערכת משוואות מקבילים, כלומר, מעצם הגדרתם, הם מעולם לא לחתוך ואין נקודת חיתוך. כאשר מערכת מוצג בדרך זו הוא אמר להיות בלתי עקבית עצמאית.
3. תמיכה נחושה
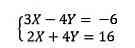
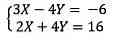
לבסוף אנו מגיעים למקרה שבו למערכת המשוואות שלנו יש פתרון אחד, המקרה שבו יש לנו קווים שמצטלבים ויוצרים נקודת מפגש. בוא נראה דוגמה:
כדי לפתור את זה אנחנו יכולים להוסיף את שתי המשוואות כדי שנוכל להשיג
(3 · X-4 · Y) + (2 · X + 4 · Y) = -6 + 16
אם נפשט, עזבנו
5 · X + 0 · Y = 5 · X = 10
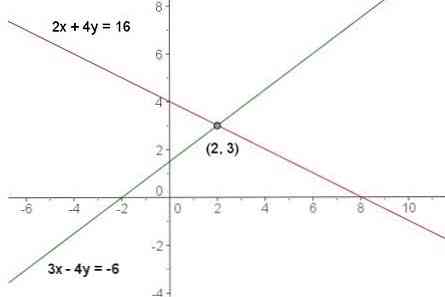
ניתן להסיק בקלות כי X = 2 והחלפה או X = 2 בכל אחת מהמשוואות המקוריות אנו משיגים Y = 3.
חזותית זה יהיה:
שיטות לפתרון מערכות משוואות לינאריות
כפי שראינו בפרק הקודם, עבור מערכות עם 2 ידועים ו 2 משוואות, על בסיס פעולות פשוטות כגון חיבור, חיסור, כפל, חלוקה ותחליפים, אנחנו יכולים לפתור אותם בתוך דקות. אבל אם ננסה ליישם מתודולוגיה זו למערכות עם משוואות יותר ויותר לא ידועים, החישובים נעשים מייגעים ואנחנו יכולים בקלות לטעות.
כדי לפשט את החישובים יש כמה שיטות של פתרון, אבל ללא ספק הנפוצות ביותר הן שיטות של Cramer של הכלל ואת ביעור גאוס ירדן..
שיטת קריימר
כדי להסביר כיצד מיושמת שיטה זו, חיוני לדעת מהי המטריצה שלה ולדעת כיצד למצוא את הגורם הקובע שלה, הבה נעשה סוגריים להגדרת שני מושגים אלו.
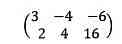
אחת מטריצה זה לא יותר מאשר סדרה של מספרים או סמלים אלגבריים להציב בקווים אופקיים ואנכיים מסודרים בצורה של מלבן. עבור הנושא שלנו נשתמש המטריצה כדרך פשוטה יותר להביע את מערכת המשוואות שלנו.
בוא נראה דוגמה:
זה יהיה מערכת של משוואות לינאריות
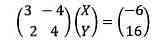
זו מערכת פשוטה של משוואות אנו יכולים לסכם את הפעולה של שתי מטריצות 2 × 2 המוביל מטריקס 2 × 1.
המטריצה הראשונה תואמת את כל המקדמים, המטריצה השנייה היא הבלתי ידועה, והמטריצה הממוקמת לאחר שהשוויון מזוהה עם המונחים העצמאיים של המשוואות
ה הקובע היא פעולה מוחלת על מטריצה שתוצאתה היא מספר ממשי.
במקרה של המטריצה שמצאנו בדוגמה הקודמת שלנו, הקובע שלה יהיה:

לאחר שהוגדרו מושגי המטריצה והגורמים הקובעים, ניתן להסביר את שיטת הקריימר.
בשיטה זו, אנו יכולים בקלות לפתור מערכת של משוואות לינאריות כל עוד המערכת אינה עולה על שלוש משוואות עם שלושה לא ידועים מאז חישוב הקריטריונים של מטריצה קשה מאוד עבור מטריצות של 4 × 4 או גבוה יותר. במקרה של מערכת עם יותר משלוש משוואות לינאריות, מומלץ להשתמש בשיטה על ידי חיסול גאוס-ירדן.
בהמשך לדוגמה הקודמת, באמצעות Cramer אנחנו פשוט צריכים לחשב שני גורמים, ואיתו נגלה את הערך של שני הלא ידועים שלנו.
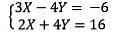
יש לנו את המערכת שלנו:
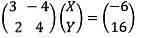
ויש לנו מערכת המיוצגת על ידי מטריצות:
ערך X נמצא:
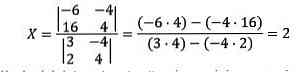
פשוט בחישוב הקובע הממוקם במכנה של החטיבה, יש לנו להחליף את הקומונה הראשונה עבור מטריצה של מונחים עצמאיים. ובמכנה של החטיבה יש לנו את הקריטריון של המטריצה המקורית שלנו.
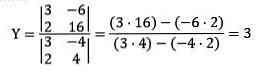
ביצוע החישובים אותו כדי למצוא את Y אנו מקבלים:
חיסול גאוס-ירדן
אנחנו מגדירים מטריצה מורחבת למטריצה הנובעת ממערכת משוואות שבה אנו מוסיפים את המונחים העצמאיים בסוף המטריצה.
השיטה על ידי חיסול של גאוס ירדן מורכבת, באמצעות פעולות בין שורות המטריצה, כדי להפוך את המטריצה המורחבת שלנו למטריצה פשוטה הרבה יותר, שבה יש לי אפסים בכל השדות, למעט באלכסון, שם אני חייב להשיג כמה. כדלקמן:

כאשר X ו- Y יהיו מספרים ממשיים התואמים את הבלתי ידועים שלנו.
בואו נפתור את השיטה הזאת על ידי ביטול גאוס-ירדן:



אנחנו כבר הצלחנו להשיג אפס בחלק השמאלי התחתון של המטריצה שלנו, השלב הבא הוא לקבל 0 בחלק הימני העליון של זה.


השגנו 0 בפינה השמאלית העליונה של המטריצה, עכשיו אנחנו רק צריכים להמיר את אלכסון לאלה ואנחנו כבר פתרו את המערכת שלנו על ידי גאוס ירדן.
לכן אנו מגיעים למסקנה כי:

הפניות
- vitutor.com.
- algebra.us.es.
- מערכות משוואות לינאריות (ללא תאריך). שחזר מ uco.es.
- מערכות משוואות לינאריות. פרק 7 (ללא ציון תאריך). מאוחזר מ sauce.pntic.mec.es.
- אלגברה לינארית וגיאומטריה (2010/2011). מערכות משוואות לינאריות. פרק 1 המחלקה לאלגברה. אוניברסיטת סביליה. ספרד משוחזר מ algebra.us.es.